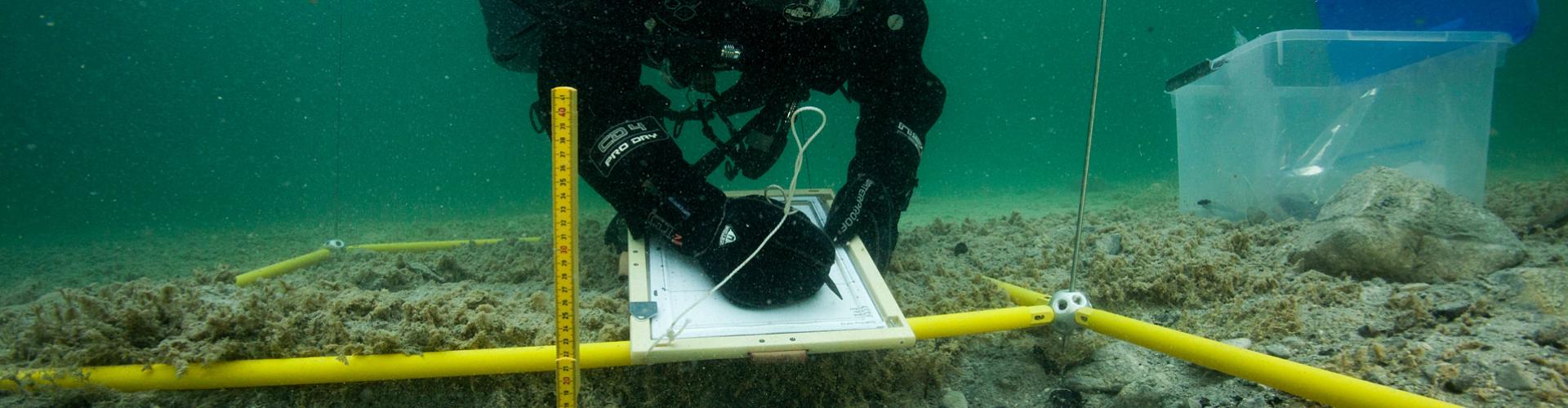











Archaeonautic ist eine Projektgruppe an der HTW-Dresden, die sich mit unterwasser-archäologischen Dokumentationstechniken befasst. Im Zentrum stehen kostengünstige und leicht zu bedienende Lösungen für Dokumentationen von Grabungsflächen und Surveys.
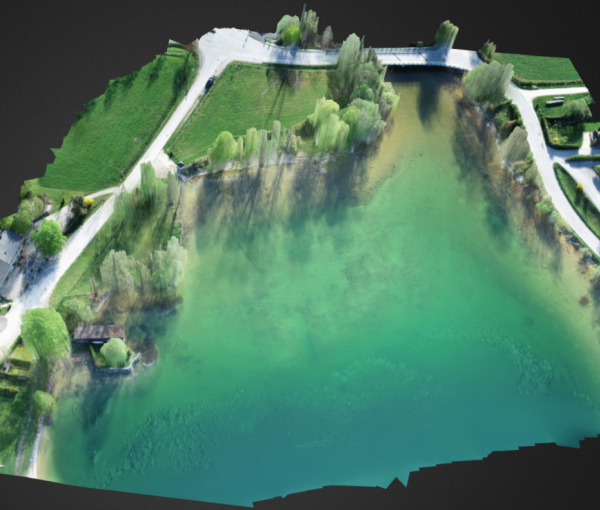
Das Kuratorium Pfahlbauten wirkt an Archaeonautic mit, um künftig detailgetreue Oberflächenmodelle von Pfahlbausiedlungen mit geringstmöglichem Aufwand erstellen zu können. Dadurch soll eine zeitlich engere und noch umfassendere Überwachung der UNESCO-Welterbestätten möglich werden, die dadurch künftig noch besser geschützt werden können. Desweiteren soll so auch die Überwachung jener Siedlungen, die nicht zumWelterbe gehören, möglich werden.
Außerdem unterstützt das Kuratorium damit gezielt die Entwicklung von Hilfmitteln für Citizen Scientists. Mittelfristig sollen diese Dokumentationstechniken den Menschen einen unmittelbaren und für die Denkmäler gefahrlosen Zugang zu den Unterwasser-Fundstellen erlauben sowie eine Mitwirkung von Citizen Scientists an Schutz und Erforschung der Pfahlbauten auch unter Wasser ermöglichen.
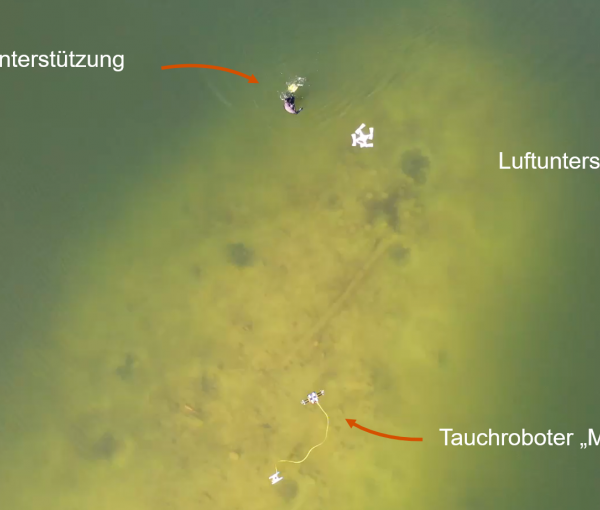
Das aktuelle Forschungsprojekt in dieser Projektgruppe heißt Archaeonomous. Darin geht es um die Entwicklung eines semi-autonomen, kabellosen Mini-U-Boots für Monitoringaufgaben im Bereich der Archäologie und Denkmalpflege. Archaeonomous ist ein drittmittelfinanziertes Projekt.
Projektleiter
Prof. Dr. Marco Block-Berlitz
Mitarbeiter
Prof. Dr.-Ing Sven Zeisberg
Benjamin Gehmlich, Dipl.-Inf (FH)
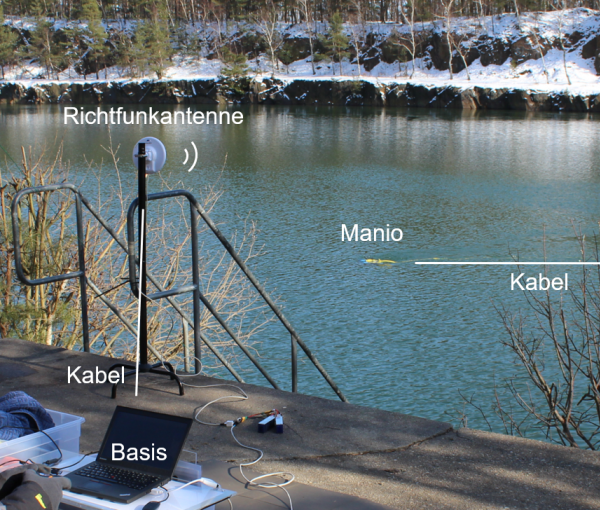
Ein mit dieser Technik ausgestattetes Mini-U-Boot könnte mit Hilfe dieser Daten semi-autonom agieren und durch einen an Land oder in einem Boot sitzenden Piloten kontrolliert werden. Die Steuerung soll semi-autonom stattfinden, damit der Pilot jederzeit die Aufgaben des Mini-U-Bootes anpassen und selbst steuern kann.
Parallel dazu wird eine virtuelle Simulationsumgebung entwickelt, in der technische Sensoren abgebildet und autonomes Verhalten basierend auf Multisensorfusion untersucht werden soll. Ziel ist u.a. eine grundlegende Schnittstelle für verschiedene Algorithmenklassen zu ermöglichen (Lokalisierung, Sensorerfassung, Verhaltensplanung, 3D-Rekonstruktion, usw.).
Diese Simulationsumgebung ermöglicht dabei nicht nur die Evaluation von Unterwasserrobotern, sondern soll eine generelle Plattform für autonome Systeme darstellen (Fluggeräte, Fahrzeuge, usw.).
Fördermittelgeber
Sächsisches Staatsministerium für Wissenschaft und Kultur
Kooperationspartner
Landesamt für Archäologie Sachsen, Deutsches Archäologisches Institut, Kuratorium Pfahlbauten, Freie Universität Berlin
Laufzeit
01.05.2017 bis 31.12.2019